
自動車の発展、E/Eアーキテクチャの変化について

ECU開発の効率を高める「HILS」とは?
2024年3月13日
自工会/部工会サイバーセキュリティガイドラインとは?制定背景から活用まで解説
2024年4月29日
自動車電装とはE/E(Electrical&Electronic)、自動車の電気及び電子装備のことを示します。各種モーターやセンサー、制御装置、操作スイッチ、ブラックボックス、カメラを含む電気系部品や装備がこれに該当します。SDVの本格化により、自動車電装分野は業界内でもこれから伸びる産業として注目されています。そしてE/Eアーキテクチャとは、自動車内部の様々な装置を管理するために搭載されている各種制御機やケーブルなどの設計構造として定義されています。つまり、車両に搭載されているE/E装置をつなぐシステムのことを意味します。今回は、E/Eアーキテクチャの発展プロセスについて取り上げながら、次世代E/Eアーキテクチャが今後どのように変化していくかについて解説します。
分散型アーキテクチャ(Distributed Architecture)とは
昔の車は、ただ移動するための手段に過ぎませんでした。車両に搭載されるコンピューティング要素と言っても、モーターの制御を含む車両動作関連のECU(Electronic Control Unit)程度であり、この時の自動車は動力機関や安全性などによって車両の性能が決定されました。当時は、車両に搭載されるECUの数が少なかったため、一つの機能を提供する低い性能のECUを複数搭載することで、車両製造のコストを下げるとともに、エンジン制御、ブレーキ制御など、機能ごとに最適化されたECUを配備することができました。
しかし、自動車の電子化に伴い、自動車の快適性や利便性を向上させるための様々な機能が搭載されるようになりました。例えば、運転者に情報や娯楽を提供するインフォテイメント機能や温熱シートなどが開発され、これらの機能を実行するECUが必要となり、自動車メーカーは必要とされるECUを追加し続けることで車両アーキテクチャを構成していきました。
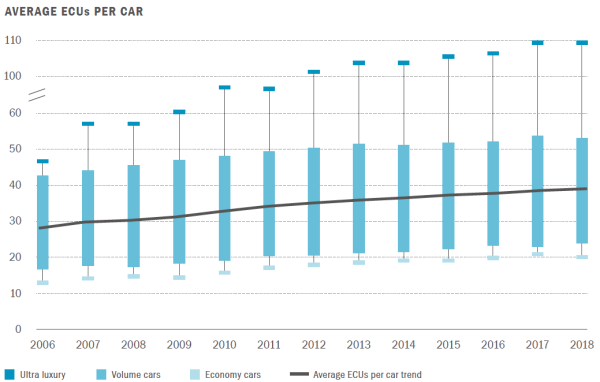
上のグラフを見ると、自動車の機能が複雑になるにつれて車両に搭載されるECUの数がますます増えているのがわかります。実際、高級車の場合には100個以上のECUが搭載されるともいわれています。このように複数のECUを用途に応じて車内各所に配置したアーキテクチャを「分散型アーキテクチャ(Distributed Architecture)」といいます。
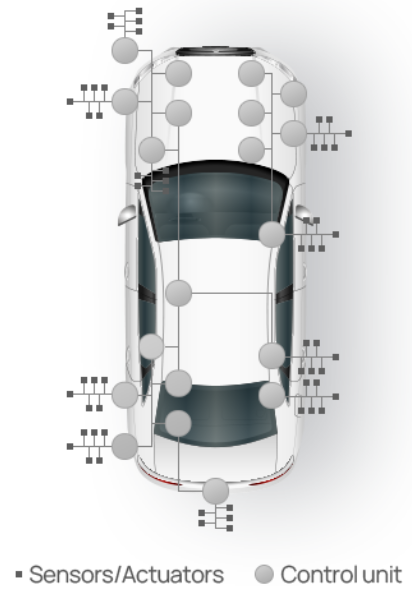
図1.分散型アーキテクチャ
出展:https://www.hyundai-kefico.com/en/future-tech/modular-architecture/content.do
分散型アーキテクチャでは図1のように、車両全体において、複数のECUが配置されている構成となっているのがわかります。 ECUの配置における基準は特になく、機能が追加されるたびにその機能を提供するECUを搭載していくため、このような複雑な構成を見せています。
分散型アーキテクチャの問題点としては、必要に応じてECUを搭載していくため、重複した機能を持つECUも存在すれば、不要な機能がそのまま残っている場合もあるということが挙げられます。こうなると、特定機能をアップデートする際には、当該機能と関連しているECUがどこに配置されているのかを見つけ出し、機能をいちいち比較しなければなりません。このアーキテクチャは車両機能の拡張性に限界があり、用途も限定的ということから、後述するドメイン型やゾーン型アーキテクチャへの移行が求められるようになりました。
ドメイン型アーキテクチャ(Domain Architecture)とは
従来の分散型アーキテクチャの課題を解決するために新しく提示されたのが「ドメイン型アーキテクチャ(Domain Architecture)」です。
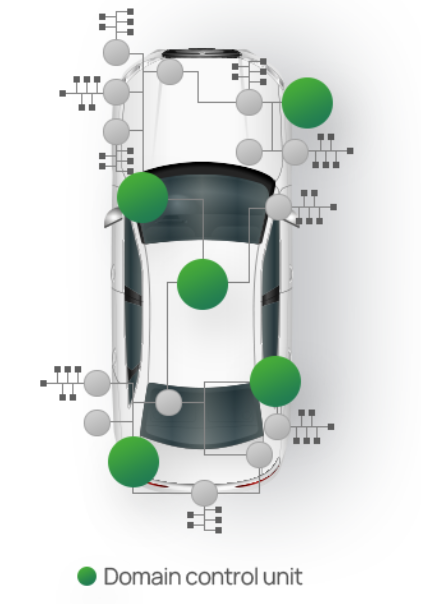
図2.ドメイン型アーキテクチャ
出典:https://www.hyundai-kefico.com/en/future-tech/modular-architecture/content.do
ドメイン型アーキテクチャでは、自動車の機能に基づいて、複数の関連機能が一つのドメインコントロールに統合されます。一般的にパワートレイン系、ボディ系、シャシ系、インフォテイメント系といった複数の機能単位(ドメイン)で分類されます。これらのドメインの制御を1つのユニットで統合することで、異なるサブシステム間の通信とデータ交換を最適化する、ドメイン制御ユニット(DCU)による集中型アーキテクチャが可能になります。ドメイン型アーキテクチャは、分散型アーキテクチャと比べ機能アップデートが容易になることから、現在多くの車両で採用されています。しかし、自動運転の到来が加速している現在、ドメインにフォーカスした従来のアーキテクチャは限界を迎えつつあります。その理由としては、2つほどが挙げられます。
1つ目に、自動運転技術の発展に伴い、車両に搭載すべき装置が爆発的に増加していることです。自動運転機能を実装するための装置は増える一方で、その装置が機能単位で縛られることによって物理的な限界が生じるようになりました。例えば、特定のドメインを管理するDCUが車両後部に配置されているとしましょう。そして、このドメインに属する装置が車両の前部に搭載されているとしたら、機能単位で分類するドメイン型アーキテクチャでは、どうしても前部の装置と後部のDCUをつなぐためのケーブルが必要になります。このようなケースが多くなると、車両のケーブルの重量と長さが耐えられないほど増えてしまいます。実際、車両ケーブルの重量および長さは車両の単価、燃費、重量に影響を与えるため、自動車設計時に非常に重要な要素となります。
2つ目に、自動運転を可能にするためには、自動車に搭載されている全ての装置間の情報共有が必須であるということです。ドメイン型アーキテクチャでは、車両装置を機能に基づいて分類しているため、機能のアップデートには最適であるものの、他のドメインに属している装置との情報共有に問題が発生する恐れがあります。
また、自動運転はシステムの判断で行われるものであり、特定機能だけを担当するDCUによる構成では、これらの情報をまとめて判断する主体が存在しないという問題もあります。一部の装置によっては複数のドメインを制御する場合もあり、この場合も、装置の管理が難しくなるというデメリットがあります。
次世代のゾーン型アーキテクチャ(Zonal Architecture)とは
前述した分散型アーキテクチャとドメイン型アーキテクチャの課題を解決し、自動運転時代における次世代E/Eアーキテクチャとして注目されているのが「ゾーン型アーキテクチャ(Zonal Architecture)」です。ゾーン型アーキテクチャは全ての機能の処理を中央の高性能コンピュータに集中させ、各装置の物理的な位置によって分けられたZCU(Zonal Control Unit)に接続する方法です。
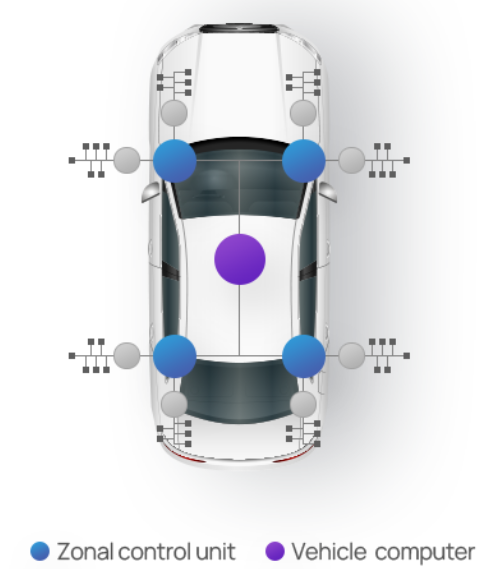
図3.ゾーン型アーキテクチャ
出典:https://www.hyundai-kefico.com/en/future-tech/modular-architecture/content.do
ゾーン型アーキテクチャでは図3のように、各装置は物理的に近いZCUに接続され、各ZCUはネットワークバックボーンを通じて中央コンピュータに接続される構成となります。従来のドメイン型アーキテクチャでは機能に基づいて車両装置を分類するのに対し、ゾーン型アーキテクチャでは位置(ゾーン)に基づいて装置を分類します。そしてZCUは設計方式によって、スイッチの役割を果たし完全中央集中型アーキテクチャとして作動することもできれば、簡単な演算処理を行うこともできます。
ゾーン型アーキテクチャでは、物理的に近いスイッチに接続されるため、部品とコントローラーをつなぐケーブルが短くなり、軽量化を図ることができます。また、特定された機能だけを提供するECUやDCUと異なり、中央コンピュータを活用することで、様々な機能を効率的に処理およびアップデートすることが可能になります。車両装置を追加する際にも、物理的に近いZCUに接続させると共に、中央コンピュータに制御ソフトウェアをインストールするだけで簡単に追加できます。
E/EアーキテクチャとSDV
SDVとは、ソフトウェアによって性能や機能を制御する電子機器化した自動車で、ゾーン型アーキテクチャの採用はSDV(Software Defined Vehicle)の実現につながるという点で大きな意味を持ちます。SDVが普及すれば、従来の自動車販売による収益から、ソフトウェアやサービス提供による収益の増加へと自動車市場の収益モデルが大きく変わるでしょう。スマートフォンで特定のアプリケーションを購入して使うことと同じように、車両を購入して必要なソフトウェアやアプリケーションを購入して使えるように変わるのです。
例えば、従来は自動車メーカーにとっての主な収益は自動車販売そのものに対し、SDVを販売することによって、車両そのものは安く提供しながら、温熱シートサービスをサブスクリプション型式で提供することが可能なうえ、OTAによるインストールやアップデートも簡単に提供できることから、付加機能による収益を図ることができます。ゾーン型アーキテクチャを採用する場合、中央コンピュータのソフトウェア修正でこのようなサービス提供が可能になります。
このようなゾーン型アーキテクチャを実現するためには、全ての車両装置のデータを処理できる高性能コンピュータと、高速かつ安定したバックボーンの通信速度を必要とします。ゾーン型アーキテクチャは、車両用コンピュータの高度化、そしてイーサネット技術が採用されるようになって可能になったアーキテクチャと言っていいでしょう。ちなみに、イーサネットバックボーンに関しては、現在、最大10Gの速度をサポートする10G-base T1などの規格が制定され、標準化が進んでいます。(※)
※出典:(https://www.marvell.com/content/dam/marvell/en/public-collateral/automotive-solutions/marvell-88q4364-automotive-product-brief.pdf)
全ての車両装置が中央コンピュータで制御されるということは、車両内部におけるセキュリティの重要性が非常に高まるとのことです。中央コンピュータへの不正侵入に成功さえすれば、車両全体における制御が可能になるからです。さらに、自動運転車両の場合、V2X通信を通じて外部との接続も可能になるため、外部からの攻撃に対するきちんとした防御対策も必要になります。
アウトクリプトは、自動車内部におけるIVS(In-Vehicle System)セキュリティから、V2X(Vehicle-to-Everything)セキュリティまで自動車環境におけるすべてのセキュリティ領域において力を入れています。現在、車両内部におけるセキュリティとV2Xセキュリティ両方を提供する企業は、世の中のごく一部に過ぎません。しかし、私達は、車両全般に対する統合セキュリティが実現してからこそ、ユーザが安心して移動できるということを信じてこれからも自動車環境を取り巻くセキュリティ技術の開発と高度化に取り組んでいきたいと思います。



