V2XŃü½ŃüŖŃüæŃéŗµŁŻńó║Ńü¬õĮŹńĮ«µāģÕĀ▒Ńü«ķćŹĶ”üµĆ¦ŃĆüSAE J2945/7Ńü½ŃüżŃüäŃü”

ŃĆÉŃāøŃā»ŃéżŃāłŃāÜŃā╝ŃāæŃā╝ŃĆæÕģ¼ķ¢ŗķŹĄµÜŚÕÅĘÕ¤║ńøż’╝łPKI’╝ēŃü©Ńü»-Ķć¬ÕŗĢĶ╗ŖµźŁńĢīŃü½ŃüŖŃüæŃéŗŃā”Ńā╝Ńé╣Ńé▒Ńā╝Ńé╣
2024Õ╣┤9µ£ł26µŚź
UN-R155µ║¢µŗĀŃü«Ńü¤ŃéüŃü«ŃāĢŃéĪŃé║ŃāåŃé╣ŃāłŃĆüŃüØŃü«ķćŹĶ”üµĆ¦Ńü©Õ░ÄÕģźĶ¬▓ķĪīŃü½ŃüżŃüäŃü”
2024Õ╣┤11µ£ł18µŚź

V2X’╝łVehicle-to-Everything’╝ēķĆÜõ┐ĪŃü»ŃĆüĶć¬ÕŗĢķüŗĶ╗óĶ╗ŖŃüīÕæ©Õø▓Ńü«Ķ╗ŖõĖĪŃéäŃéżŃā│ŃāĢŃā®Ńü©Ńā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃü¦ŃāćŃā╝Ńé┐ŃéÆõ║żµÅøŃüÖŃéŗŃü¤ŃéüŃü«Õ¤║ńøżŃü¦ŃüÖŃĆéŃüōŃü«ķĆÜõ┐ĪŃü½ŃüŖŃüäŃü”ŃĆüĶ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü¦Ńü«µŁŻńó║Ńü¬õĮŹńĮ«µāģÕĀ▒ŃüīõĖŹÕÅ»µ¼ĀŃü¦ŃüÖŃĆéńē╣Ńü½ŃĆüõ║żÕĘ«ńé╣ŃéäĶżćķøæŃü¬õ║żķĆÜńÆ░ÕóāŃü¦Ńü«Ńé╣ŃāĀŃā╝Ńé║Ńü¬ķüŗĶ╗óŃéäĶĪØń¬üÕø×ķü┐Ńü½Ńü»ŃĆüõĮŹńĮ«µāģÕĀ▒Ńü«ń▓ŠÕ║”ŃüīķćŹĶ”üŃü¬ÕĮ╣Õē▓ŃéƵףŃü¤ŃüŚŃüŠŃüÖŃĆé
V2X’╝łVehicle-to-Everything’╝ēµŖĆĶĪōŃéƵ┤╗ńö©ŃüŚŃü¤µ¦śŃĆģŃü¬ŃéĄŃā╝ŃāōŃé╣Ńü«õĖŁŃü¦ŃééŃĆüĶ╗ŖõĖĪŃü«õĮŹńĮ«ŃéƵŖŖµÅĪŃüÖŃéŗŃĆīV2XŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃĆŹŃü»ńē╣Ńü½ķćŹĶ”üŃü¬µŖĆĶĪōŃü¦ŃüÖŃĆéŃüōŃéīŃü»ŃĆüĶ╗ŖõĖĪŃü«µŁŻńó║Ńü¬õĮŹńĮ«ŃéƵŖŖµÅĪŃüÖŃéŗŃüōŃü©ŃüīÕżÜŃüÅŃü«ŃéĄŃā╝ŃāōŃé╣Ńü«ÕēŹµÅɵØĪõ╗ČŃü¦ŃüéŃéŖŃĆüõĮŹńĮ«µāģÕĀ▒ŃüīŃü¬ŃüæŃéīŃü░õĮŹńĮ«Õ¤║ńøżŃéĄŃā╝ŃāōŃé╣ŃüīµłÉŃéŖń½ŗŃü¤Ńü¬ŃüäŃü¤ŃéüŃü¦ŃüÖŃĆé
V2XŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░Ńü»ŃĆüÕ¤║µ£¼ńÜäŃü½GNSS’╝łÕģ©Õ£░ńÉāµĖ¼õĮŹŃéĘŃé╣ŃāåŃāĀ’╝ēŃéÆÕ¤║ńøżŃü½ŃüŚŃü”ŃüäŃüŠŃüÖŃĆéŃüŚŃüŗŃüŚŃĆüGNSSŃü½ŃéłŃéŗõĮŹńĮ«µĖ¼Õ«ÜŃü½Ńü»ķÖÉńĢīŃüīŃüéŃéŖŃĆüÕ«īÕģ©Ńü½µŁŻńó║Ńü¬õĮŹńĮ«µāģÕĀ▒ŃéƵÅÉõŠøŃüÖŃéŗŃüōŃü©Ńü»ķøŻŃüŚŃüÅŃĆüÕ┐ģŃüÜõĖĆÕ«ÜŃü«Ķ¬żÕĘ«ŃüīńÖ║ńö¤ŃüŚŃüŠŃüÖŃĆéŃüØŃü«Ńü¤ŃéüŃĆüńÅŠÕ£©Ńü«GNSSÕÅŚõ┐Īµ®¤Ńü»ŃĆīõ┐ĪķĀ╝Õ║”58’╝ģŃü«ń»äÕø▓Ńü¦ń┤ä1.5ŃāĪŃā╝ŃāłŃā½Ńü«Ķ¬żÕĘ«ŃĆŹŃü©ŃüäŃüŻŃü¤ÕĮóŃü¦ń▓ŠÕ║”ŃüīĶĪ©Ķ©śŃüĢŃéīŃüŠŃüÖŃĆéŃüżŃüŠŃéŖŃĆü42’╝ģŃü«Ńé▒Ńā╝Ńé╣Ńü¦Ńü»Ķ¬żÕĘ«Ńüī1.5ŃāĪŃā╝ŃāłŃā½ŃéÆĶČģŃüłŃéŗÕÅ»ĶāĮµĆ¦ŃüīŃüéŃéŗŃü©ŃüäŃüåŃüōŃü©Ńü¦ŃüÖŃĆéŃüōŃü«ŃéłŃüåŃü¬Ķ¬żÕĘ«Ńü»ŃĆüµŁŻńó║ŃüĢŃüīµ▒éŃéüŃéēŃéīŃéŗŃā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃéĘŃé╣ŃāåŃāĀŃü¦Ńü»Õż¦ŃüŹŃü¬ÕĢÅķĪīŃü©Ńü¬ŃéŖŃüŠŃüÖŃĆéŃüĢŃéēŃü½ŃĆüŃüōŃü«µĖ¼Õ«Üń▓ŠÕ║”Ńü»Õø║Õ«ÜŃüĢŃéīŃü¤Õ¤║µ║¢ńé╣Ńü¦Ńü«ĶżćµĢ░Õø×Ńü«µĖ¼Õ«ÜŃéÆÕēŹµÅÉŃü©ŃüÖŃéŗŃü¤ŃéüŃĆüGNSSŃü«µĆ¦ĶāĮŃüīÕĮ▒ķ¤┐ŃéÆõĖÄŃüłŃéäŃüÖŃüäŃü¦ŃüÖŃĆéŃüŚŃüŗŃüŚŃĆüĶĄ░ĶĪīõĖŁŃü«Ķ╗ŖõĖĪŃü½Ńü©ŃüŻŃü”Ńü»ŃĆüŃā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃü¦ÕżēÕŗĢŃüÖŃéŗń▓ŠÕ║”ŃüīõĖŹÕÅ»µ¼ĀŃü¦ŃüéŃéŖŃĆüŃéłŃéŖķ½śŃüäŃā¼ŃāÖŃā½Ńü«µŁŻńó║ŃüĢŃüīÕ┐ģĶ”üŃü¦ŃüÖŃĆéŃüŚŃü¤ŃüīŃüŻŃü”ŃĆüńÅŠĶĪīŃü«GNSSµ¢╣Õ╝ÅŃü©Ńü»ńĢ░Ńü¬ŃéŗŃĆüŃā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃü½Õ»ŠÕ┐£ŃüŚŃü¤µ¢░ŃüŚŃüäõĮŹńĮ«µāģÕĀ▒ŃéĘŃé╣ŃāåŃāĀŃüīµ▒éŃéüŃéēŃéīŃü”ŃüäŃüŠŃüÖŃĆé
õĮ┐ńö©ŃüĢŃéīŃü”ŃüäŃéŗŃéĘŃé╣ŃāåŃāĀŃü©Ķ¬▓ķĪī
ń▒│ÕøĮĶć¬ÕŗĢĶ╗ŖµŖĆĶĪōĶĆģÕŹöõ╝Ü’╝łSAE’╝ÜSociety of Automotive Engineers’╝ēŃüīŃüŠŃü©ŃéüŃü¤ŃĆīSAE J2945/7ŃĆŹµ¢ćµøĖŃü½Ńü»ŃĆüŃĆīV2Xń▓ŠÕ»åŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃĆŹŃü½ķ¢óŃüÖŃéŗÕåģÕ«╣ŃüīĶ©śĶ╝ēŃüĢŃéīŃü”ŃüäŃüŠŃüÖŃĆéV2XŃü«ń▓ŠÕ»åŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░Ńü©Ńü»ŃĆüĶ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«ŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃéƵäÅÕæ│ŃüŚŃüŠŃüÖŃĆéĶ╗ŖõĖĪŃü«ŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░Ńü«ń▓ŠÕ║”Ńü»ŃĆüÕż¦ŃüŹŃüÅŃĆīŃāĪŃā╝ŃāłŃā½Ńā¼ŃāÖŃā½Ńü«ń▓ŠÕ║”ŃĆŹŃü©ŃĆīĶ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«ń▓ŠÕ║”ŃĆŹŃü½ÕłåķĪ×ŃüĢŃéīŃüŠŃüÖŃĆéV2XķĆÜõ┐ĪŃü¦Ńü»GNSS’╝łÕģ©Õ£░ńÉāµĖ¼õĮŹŃéĘŃé╣ŃāåŃāĀ’╝ēŃüīõĖĆĶł¼ńÜäŃü½õĮ┐ńö©ŃüĢŃéīŃü”ŃüäŃüŠŃüÖŃüīŃĆüGNSSŃü»ķāĮÕĖéķā©Ńü¦Ńü«ķø╗µ│óÕ╣▓µĖēŃéäÕżÜķćŹÕÅŹÕ░äŃü½ŃéłŃéŗĶ¬żÕĘ«ŃüīµĢ░ŃāĪŃā╝ŃāłŃā½ÕŹśõĮŹŃü¦ńÖ║ńö¤ŃüÖŃéŗŃü©ŃüäŃüåĶ¬▓ķĪīŃüīŃüéŃéŖŃüŠŃüÖŃĆéŃüŠŃü¤ŃĆüDSRC’╝łÕ░éńö©ń¤ŁĶĘØķøóķĆÜõ┐Ī’╝ēŃéäC-V2X’╝łŃé╗Ńā½Ńā®Ńā╝V2X’╝ēµŖĆĶĪōŃéÆńö©ŃüäŃü”Ķ╗ŖõĖĪķ¢ōŃü«µāģÕĀ▒õ║żµÅøŃéÆĶĪīŃüŻŃü”ŃüäŃüŠŃüÖŃüīŃĆüŃüōŃéīŃüĀŃüæŃü¦Ńü»Ķ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«ķ½śń▓ŠÕ║”ŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃéÆÕ«¤ńÅŠŃüÖŃéŗŃü«Ńü»ķøŻŃüŚŃüäŃü¦ŃüÖŃĆé
ķü®ńö©õŠŗŃü©Õ┐ģĶ”üŃü¬ń▓ŠÕ║”
Ńā╗ŃāĪŃā╝ŃāłŃā½Ńā¼ŃāÖŃā½Ńü«ń▓ŠÕ║”: GNSS’╝łÕģ©Õ£░ńÉāµĖ¼õĮŹŃéĘŃé╣ŃāåŃāĀ’╝ēŃü«ń▓ŠÕ║”Ńü½ńøĖÕĮōŃüÖŃéŗŃééŃü«Ńü¦ŃĆüŃāĪŃā╝ŃāłŃā½ÕŹśõĮŹŃü¦Ńü«õĮŹńĮ«µāģÕĀ▒Ńü«ŃüōŃü©ŃéƵīćŃüŚŃüŠŃüÖŃĆéńøŚķøŻĶ╗ŖŃü«Ķ┐ĮĶĘĪŃéäÕø×ÕÅÄŃü¬Ńü®ŃĆüķ½śŃüäń▓ŠÕ║”ŃéÆÕ┐ģĶ”üŃü©ŃüŚŃü¬Ńüäńö©ķĆöŃü½ķü®ŃüŚŃü”ŃüäŃüŠŃüÖŃĆéńøŚķøŻĶ╗ŖŃü«õĮŹńĮ«ŃéÆÕż¦ŃüŠŃüŗŃü½ńē╣Õ«ÜŃü¦ŃüŹŃéīŃü░ÕŹüÕłåŃü¬Ńü¤ŃéüŃĆüĶ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«ń▓ŠÕ║”ŃüŠŃü¦Ńü»õĖŹĶ”ü
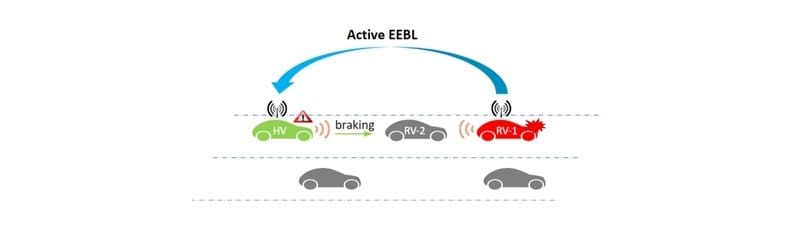
Ńā╗Ķ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«ń▓ŠÕ║”: ķüōĶĘ»õĖŖŃü¦Ķ╗ŖõĖĪŃüīŃü®Ńü«Ķ╗ŖńĘÜŃü½ŃüäŃéŗŃüŗŃüŠŃü¦µŁŻńó║Ńü½ńē╣Õ«ÜŃü¦ŃüŹŃéŗń▓ŠÕ║”ŃéƵīćŃüŚŃüŠŃüÖŃĆéÕēŹµ¢╣Ńü«Ķ╗ŖõĖĪŃéÆĶ¬ŹĶŁśŃüŚŃĆüGPSõĮŹńĮ«µāģÕĀ▒ŃéÆńö©ŃüäŃü”ĶĪØń¬üÕø×ķü┐Ńü«ĶŁ”ÕæŖŃéÆķĆüõ┐ĪŃüÖŃéŗŃéóŃāŚŃā¬Ńé▒Ńā╝ŃéĘŃā¦Ńā│Ńü¦Ńü»ŃĆüĶ╗ŖńĘÜÕŹśõĮŹŃü«µŁŻńó║Ńü¬õĮŹńĮ«µāģÕĀ▒ŃüīõĖŹÕÅ»µ¼Ā
ŃüōŃü«ŃéłŃüåŃü½ŃĆüV2XŃü«Ķ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«ń▓ŠÕ»åŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░Ńü»ŃĆüŃéłŃéŖķ½śÕ║”Ńü¬Õ«ēÕģ©ķüŗĶ╗óµö»µÅ┤ŃéĘŃé╣ŃāåŃāĀŃéäĶć¬ÕŗĢķüŗĶ╗óŃü½ŃüŖŃüäŃü”ŃĆüķćŹĶ”üŃü¬ÕĮ╣Õē▓ŃéƵףŃü¤ŃüÖŃü©ĶĆāŃüłŃéēŃéīŃüŠŃüÖŃĆé
SAE J2945/7µ©Öµ║¢Ńü«ÕĮ╣Õē▓
SAE J2945/7Ńü»ŃĆüV2XķĆÜõ┐ĪŃü«Ńü¤ŃéüŃü«ķ½śń▓ŠÕ║”ŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃéƵ©Öµ║¢Õī¢ŃüÖŃéŗŃü¤ŃéüŃü«Ķ”ŵĀ╝Ńü¦ŃüÖŃĆéŃüōŃü«µ©Öµ║¢Ńü«õĖ╗Ńü¬ńø«ńÜäŃü»ŃĆüĶ╗ŖńĘÜŃā¼ŃāÖŃā½Ńü«õĮŹńĮ«ń▓ŠÕ║”ŃéÆńó║õ┐ØŃüŚŃĆüĶ╗ŖõĖĪķ¢ōķĆÜõ┐ĪŃü«Õ«ēÕģ©µĆ¦Ńü©ÕŖ╣ńÄćŃéÆÕÉæõĖŖŃüĢŃüøŃéŗŃüōŃü©Ńü¦ŃüÖŃĆéńē╣Ńü½ŃĆüĶ╗ŖõĖĪŃü«µ¢╣ÕÉæŃéÆĶĪ©ŃüÖŃĆīµ¢╣õĮŹĶ¦Æ’╝łheading’╝ēŃĆŹŃü©ŃĆīķĆ▓ĶĪīĶ¦Æ’╝łcourse’╝ēŃĆŹŃü«Õī║ÕłźŃéƵśÄńó║Ńü½ŃüÖŃéŗŃüōŃü©Ńüīµ▒éŃéüŃéēŃéīŃĆüŃüōŃéīŃü½ŃéłŃéŖĶ╗ŖõĖĪŃü«ķĆ▓ĶĪīµ¢╣ÕÉæŃüīµŁŻńó║Ńü½õ╝ØŃüłŃéēŃéīŃüŠŃüÖŃĆé
ŃüĢŃéēŃü½ŃĆüSAE J2945/7Ńü»Ńā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃü¦õĮŹńĮ«µāģÕĀ▒Ńü«ÕōüĶ│¬ŃéÆńøŻĶ”¢ŃüÖŃéŗŃé¼ŃéżŃāēŃā®ŃéżŃā│ŃéƵÅÉõŠøŃüŚŃü”ŃüŖŃéŖŃĆüńĢ░ÕĖĖŃü¬õĮŹńĮ«µāģÕĀ▒ŃüīńÖ║ńö¤ŃüŚŃü¤ÕĀ┤ÕÉłŃü½ÕŹ│µÖéŃü½µż£Õć║Ńā╗Õ»ŠÕ┐£Ńü¦ŃüŹŃéŗõ╗ĢńĄäŃü┐ŃéÆµÄ©Õź©ŃüŚŃü”ŃüäŃüŠŃüÖŃĆéŃüōŃü«µ©Öµ║¢Ńü«ķü®ńö©Ńü½ŃéłŃéŖŃĆüŃéłŃéŖõ┐ĪķĀ╝µĆ¦Ńü«ķ½śŃüäŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃüīÕÅ»ĶāĮŃü©Ńü¬ŃéŖŃĆüķāĮÕĖéńÆ░ÕóāŃéäķ½śÕ»åÕ║”õ║żķĆÜŃü½ŃééÕ»ŠÕ┐£Ńü¦ŃüŹŃéŗŃéłŃüåŃü½Ńü¬ŃéŖŃüŠŃüÖŃĆé
- SAE J2945/7Ńü«V2XŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░Ńü½ķ¢óŃüÖŃéŗĶ¦ŻĶ¬¼
SAE J2945/7Ńü¦Ńü»ŃĆüń▓ŠÕ»åŃü¬ŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃéÆÕł®ńö©ŃüÖŃéŗÕżÜµ¦śŃü¬ŃéóŃāŚŃā¬Ńé▒Ńā╝ŃéĘŃā¦Ńā│ŃéÆÕ«ÜńŠ®ŃüŚŃü”ŃüäŃüŠŃüÖŃĆéŃüŠŃü¤ŃĆüÕŠōµØźŃü«GNSSŃü©Ńü»ńĢ░Ńü¬ŃéŗõĮŹńĮ«ń▓ŠÕ║”Ńü«µ¢░ŃüŚŃüäĶĪ©Ķ©śµ¢╣µ│ĢŃééµÅɵĪłŃüŚŃü”ŃüäŃüŠŃüÖŃĆéńÅŠÕ£©Ńü«SAE J2945ŃéäSAE J3224Ńü©ŃüäŃüŻŃü¤Õ¤║µ║¢Ńü¦Ńü»ŃĆüõĮŹńĮ«ń▓ŠÕ║”Ńü«ÕģĘõĮōńÜäŃü¬µĖ¼Õ«ÜÕĆżŃéäĶĪ©ńż║Õ¤║µ║¢ŃüīµśÄńó║Ńü½ńż║ŃüĢŃéīŃü”ŃüäŃüŠŃüøŃéōŃĆéŃüØŃü«Ńü¤ŃéüŃĆüµŁŻńó║Ńü¬Õ«¤ĶŻģŃéÆÕ«¤ńÅŠŃüÖŃéŗŃü¤ŃéüŃü½Ńü»µ©Öµ║¢Ńü«µö╣Ķē»ŃüīÕ┐ģĶ”üŃü¦ŃüÖŃĆéSAE J2945/7Ńü»ŃĆüµ¢░ŃüŚŃüäõĮŹńĮ«ń▓ŠÕ║”Õ¤║µ║¢ŃéƵÅɵĪłŃüŚŃĆüĶ®│ń┤░Ńü¬µĢ░ÕĆżŃü»ńż║ŃüĢŃü¬ŃüäŃééŃü«Ńü«ŃĆüŃü®Ńü«ŃéłŃüåŃü¬µīćķćØŃüīķćŹĶ”üŃüŗŃü½ŃüżŃüäŃü”µ¢╣ÕÉæµĆ¦ŃéƵÅÉńż║ŃüŚŃü”ŃüäŃüŠŃüÖŃĆé
- õ┐ĪķĀ╝µĆ¦Ńü«µ¢░ŃüŚŃüäµ”éÕ┐ĄŃü©ÕłåķĪ×
Ķ╗ŖõĖĪŃü«Ķ”│ńé╣ŃüŗŃéēŃü»ŃĆüŃā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃü¦Ńü«µŁŻńó║Ńü¬õĮŹńĮ«µĖ¼Õ«ÜŃüīķøŻŃüŚŃüäŃü¤ŃéüŃĆü”ń▓ŠÕ║””Ńü©ŃüäŃüåŃéłŃéŖ”õ┐ĪķĀ╝µĆ¦”ŃéÆķćŹĶ”¢ŃüŚŃü¤ĶĪ©Ķ©śŃéƵÅɵĪłŃüŚŃü”ŃüäŃüŠŃüÖŃĆéŃüŠŃü¤ŃĆüõ┐ĪķĀ╝µĆ¦Ńü½Õ¤║ŃüźŃüäŃü”ŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃéĘŃé╣ŃāåŃāĀŃü«µĆ¦ĶāĮŃéÆõ╗źõĖŗŃü«5µ«ĄķÜÄŃü½ÕłåķĪ×ŃüÖŃéŗŃüōŃü©ŃééµÄ©Õź©ŃüŚŃü”ŃüäŃüŠŃüÖŃĆéĶ╗ŖõĖĪŃü»100msŃüöŃü©Ńü½Õæ©Õø▓Ńü«ĶżćµĢ░Ķ╗ŖõĖĪŃüŗŃéēŃāĪŃāāŃé╗Ńā╝ŃéĖŃéÆÕÅŚõ┐ĪŃüÖŃéŗŃü¤ŃéüŃĆüŃüōŃü«ÕłåķĪ×Ńü½Õ¤║ŃüźŃüäŃü”ŃāĪŃāāŃé╗Ńā╝ŃéĖŃéÆŃāĢŃéŻŃā½Ńé┐Ńā¬Ńā│Ńé░ŃüŚŃĆüĶ┐ģķƤŃü½Õć”ńÉåŃüÖŃéŗŃüōŃü©Ńüīµ▒éŃéüŃéēŃéīŃüŠŃüÖŃĆé
- µ©Öµ║¢Ńü«ÕĢÅķĪīŃü©ńĄ▒õĖĆŃü«Õ┐ģĶ”üµĆ¦
SAE J2945/7Ńü»ŃĆüńÅŠÕ£©Ńü«SAE V2Xµ©Öµ║¢Ńü½ŃüŖŃüæŃéŗĶ¬▓ķĪīŃééµīćµæśŃüŚŃüŠŃüÖŃĆéõŠŗŃüłŃü░ŃĆüSAE J2735Ńü¦Ńü»ŃĆīĶ╗ŖõĮōŃüīÕÉæŃüäŃü”ŃüäŃéŗµ¢╣ÕÉæ (Heading)ŃĆŹŃü©ŃĆīķĆ▓ĶĪīµ¢╣ÕÉæ(Course angle)ŃĆŹŃéÆÕÉīõĖĆĶ”¢ŃüŚŃü”ŃüäŃüŠŃüÖŃüīŃĆüŃüōŃéīŃéēŃü»ńĢ░Ńü¬ŃéŗÕĆżŃü¦ŃüéŃéŖŃĆüµĘĘÕÉīŃüÖŃü╣ŃüŹŃü¦Ńü»Ńü¬ŃüäŃü©µīćµæśŃüŚŃüŠŃüÖŃĆéÕģĘõĮōńÜäŃü½Ńü»ŃĆüSAE J2735Ńü«ŃĆīDE_HeadingŃĆŹŃü»µ£¼µØźŃü«µäÅÕæ│Ńü¦Ńü«Ķ╗ŖõĮōŃüīÕÉæŃüäŃü”ŃüäŃéŗµ¢╣ÕÉæ (Heading)ŃéÆńż║ŃüĢŃüÜŃĆüÕĀ┤ÕÉłŃü½ŃéłŃüŻŃü”Ńü» ķĆ▓ĶĪīµ¢╣ÕÉæ(Course angle)ŃéÆńż║ŃüÖŃü¬Ńü®ŃĆüõĖĆĶ▓½µĆ¦Ńüīµ¼ĀÕ”éŃüŚŃü”ŃüäŃüŠŃüÖŃĆéŃüōŃéīŃü½ŃéłŃéŖŃĆüµ©Öµ║¢ķ¢ōŃü¦Ńü«ńĄ▒õĖĆŃüīÕ┐ģĶ”üŃüĀŃü©Õ╝ĘĶ¬┐ŃüŚŃü”ŃüäŃüŠŃüÖŃĆé
- ┬ĀÕ║¦µ©Öń│╗Ńü©Ķ╗ŖõĖĪŃü«Õ¤║µ║¢ńé╣
ŃüĢŃéēŃü½ŃĆüĶ╗ŖõĖĪŃü«Õ¤║µ║¢ńé╣ŃéÆŃĆīŃā¬ŃāżŃéóŃé»Ńé╣Ńā½’╝łrear axle’╝ēŃĆŹŃü«õĖŁÕ┐āŃü½Ķ©ŁÕ«ÜŃüÖŃéŗŃüōŃü©ŃéƵÅɵĪłŃüŚŃĆüĶ╗ŖõĖĪŃāÖŃā╝Ńé╣Ńü«Õ║¦µ©Öń│╗Ńü»ŃĆīķćŹÕŖøŃāÖŃé»ŃāłŃā½ŃĆŹŃü©ŃĆīķüōĶĘ»ŃāÖŃé»ŃāłŃā½ŃĆŹŃü«2ŃüżŃéÆÕÉīµÖéŃü½õĮ┐ńö©ŃüÖŃéŗŃüōŃü©ŃüīµÄ©Õź©ŃüŚŃü”ŃüäŃüŠŃüÖŃĆé
- ┬Āµö╣Õ¢äŃü«Ńü¤ŃéüŃü«µÅɵĪł
SAE J2945/7Ńü»ŃĆüGNSSŃüīŃéĖŃāŻŃā¤Ńā│Ńé░(Jamming)ŃéäŃé╣ŃāŚŃā╝ŃāĢŃéŻŃā│Ńé░(Spoofing)µö╗µÆāŃü½ĶäåÕ╝▒Ńü¦ŃüéŃéŗŃüōŃü©ŃéƵīćµæśŃüŚŃĆüŃüōŃéīŃéÆĶŻ£ŃüåŃü¤ŃéüŃü½UWB(ĶČģÕ║āÕĖ»Õ¤¤ķĆÜõ┐Ī)ŃĆü5G NR(ŃāŗŃāźŃā╝Ńā®ŃéĖŃé¬)ŃĆüŃüŖŃéłŃü│**ŃéĄŃéżŃāēŃā¬Ńā│Ńé»(Sidelink)**ŃéƵ┤╗ńö©ŃüÖŃéŗŃüōŃü©ŃéƵÅɵĪłŃüŚŃü”ŃüäŃüŠŃüÖŃĆéŃüōŃéīŃü½ŃéłŃéŖŃĆüŃā¬ŃéóŃā½Ńé┐ŃéżŃāĀŃü¦Ńü«õĮŹńĮ«ĶŻ£µŁŻŃüīÕÅ»ĶāĮŃü©Ńü¬ŃéŖŃĆüŃéłŃéŖõ┐ĪķĀ╝µĆ¦Ńü«ķ½śŃüäŃéĘŃé╣ŃāåŃāĀŃüīµ¦ŗń»ēŃü¦ŃüŹŃüŠŃüÖŃĆé
ńĄÉĶ½¢
ŃüōŃéīŃüŗŃéēŃü»ŃĆüUWBŃéä5GŃü©ŃüäŃüŻŃü¤µ¢░µŖĆĶĪōŃü«µ┤╗ńö©Ńü©ŃĆüõĮŹńĮ«µāģÕĀ▒ŃéĘŃé╣ŃāåŃāĀŃü«µ©Öµ║¢Õī¢Ńü«µÄ©ķĆ▓ŃüīõĖĆÕ▒żķćŹĶ”üŃü½Ńü¬ŃéŗŃü¦ŃüŚŃéćŃüåŃĆéŃüōŃéīŃü½ŃéłŃéŖŃĆüĶć¬ÕŗĢķüŗĶ╗óŃü«Õ«ēÕģ©µĆ¦Ńü©ÕŖ╣ńÄćµĆ¦ŃüīÕż¦Õ╣ģŃü½ÕÉæõĖŖŃüŚŃĆüĶć¬ÕŠŗĶĄ░ĶĪīńżŠõ╝ÜŃü«ńÖ║Õ▒ĢŃüīµ£¤ÕŠģŃüĢŃéīŃüŠŃüÖŃĆéńē╣Ńü½ŃĆüV2XŃéƵ┤╗ńö©ŃüÖŃéŗŃüĢŃüŠŃü¢ŃüŠŃü¬ŃéĄŃā╝ŃāōŃé╣Ńü«õĖŁŃü¦ŃĆüµ£ĆŃééķćŹĶ”üŃü¬ŃéĄŃā╝ŃāōŃé╣Ńü»ŃĆīV2XŃāØŃéĖŃéĘŃā¦ŃāŗŃā│Ńé░ŃĆŹŃü½Ńü¬ŃéŗŃü©Ķ”ŗĶŠ╝ŃüŠŃéīŃüŠŃüÖŃĆéŃüōŃü«µ©Öµ║¢ŃéƵĘ▒ŃüÅńÉåĶ¦ŻŃüÖŃéŗŃüōŃü©Ńü¦ŃĆüV2XµŖĆĶĪōŃü«µ┤╗ńö©Ńü½ŃüŖŃüäŃü”Ķ▓┤ķćŹŃü¬ŃéżŃā│ŃéĄŃéżŃāłŃéÆÕŠŚŃéŗŃüōŃü©ŃüīŃü¦ŃüŹŃéŗŃü¦ŃüŚŃéćŃüåŃĆé